Another lifting mechanism commonly used in competition robotics is a linear elevator.
The VEX Robotics Design System has many different ways to create rotational mechanisms and low-friction rotating joints but has only a few methods for low-friction linear motion. As a result, this type of mechanism is less common than a rotating joint on competition robots; however, it does have some advantages.
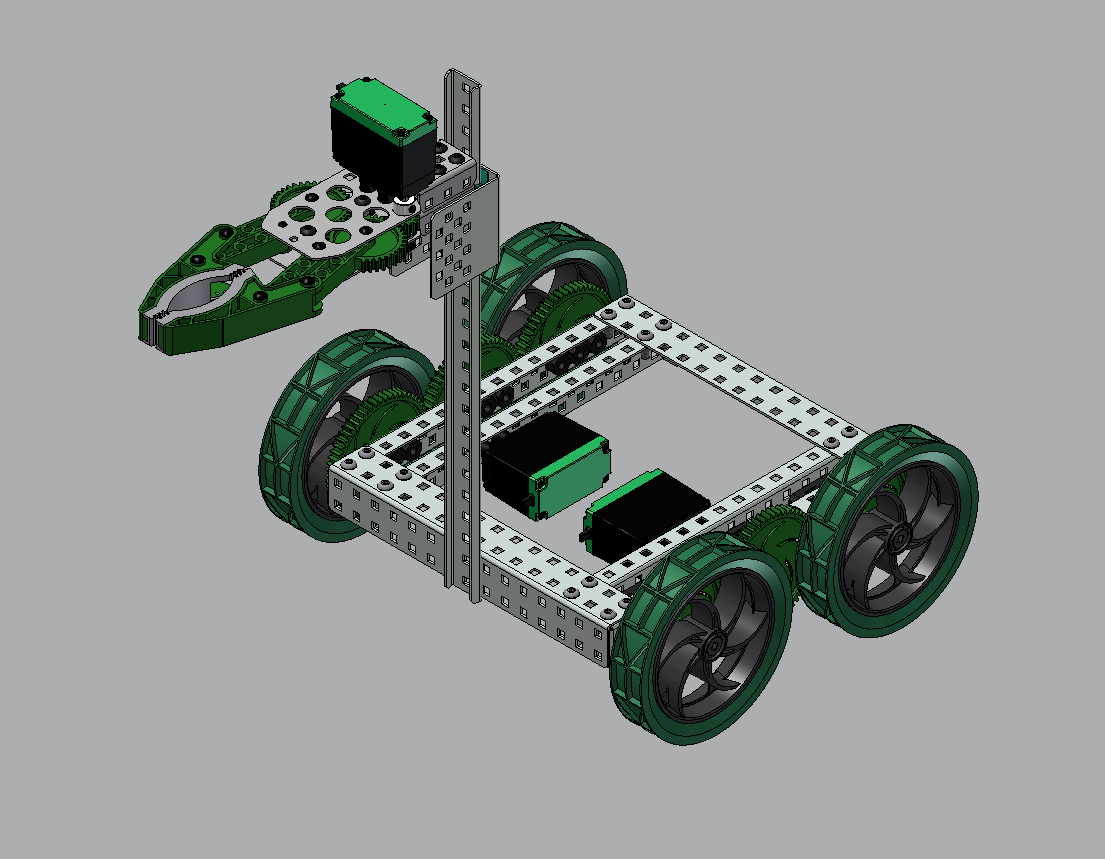
As seen in the example below, as the rotating joint raises upwards the robot’s claw will swing in an arc about the point of rotation. This means the distance between the claw and the drive base varies depending on the height the claw is at. If a driver is trying to score in goals of different heights, the driver must position the robot the correct distance away based on the height of the goal.
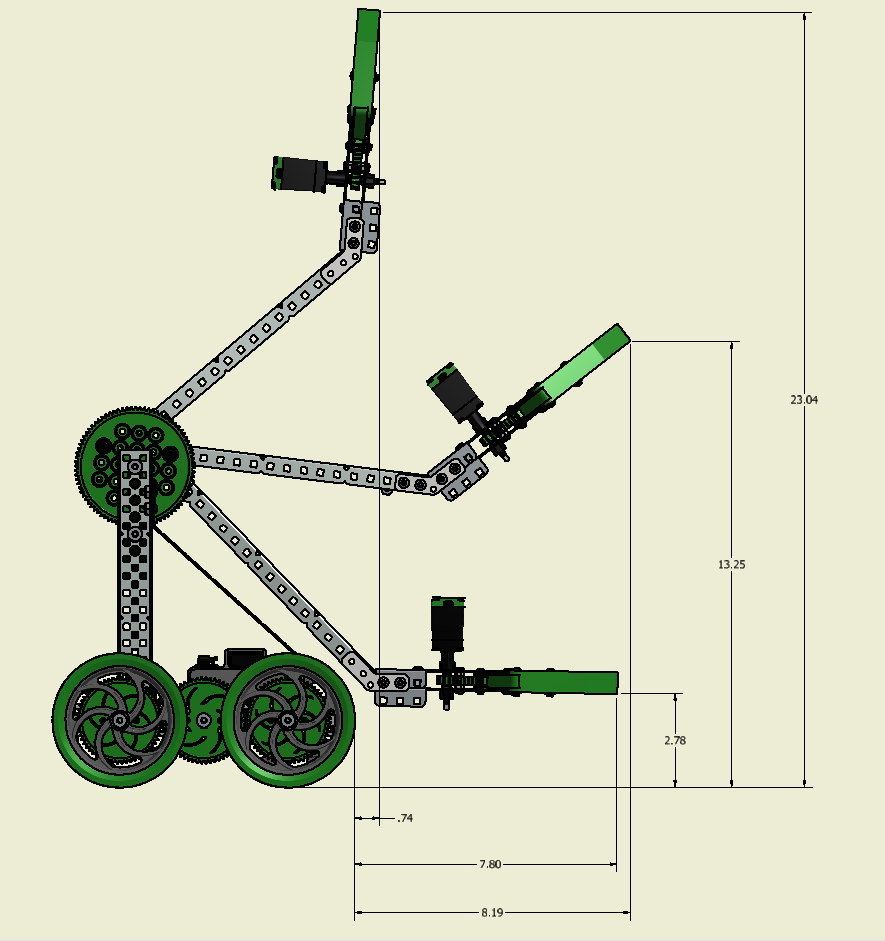
A claw mounted on a linear elevator is always a consistent distance from the drivebase, so regardless of the goal height, the driver will need to move the robot to the same distance from the goal.
Another difference between an elevator and rotating joint is the way the object changes orientation. In a rotating joint, as the joint lifts the arm changes orientation. A linear elevator does not change orientation as it elevates.
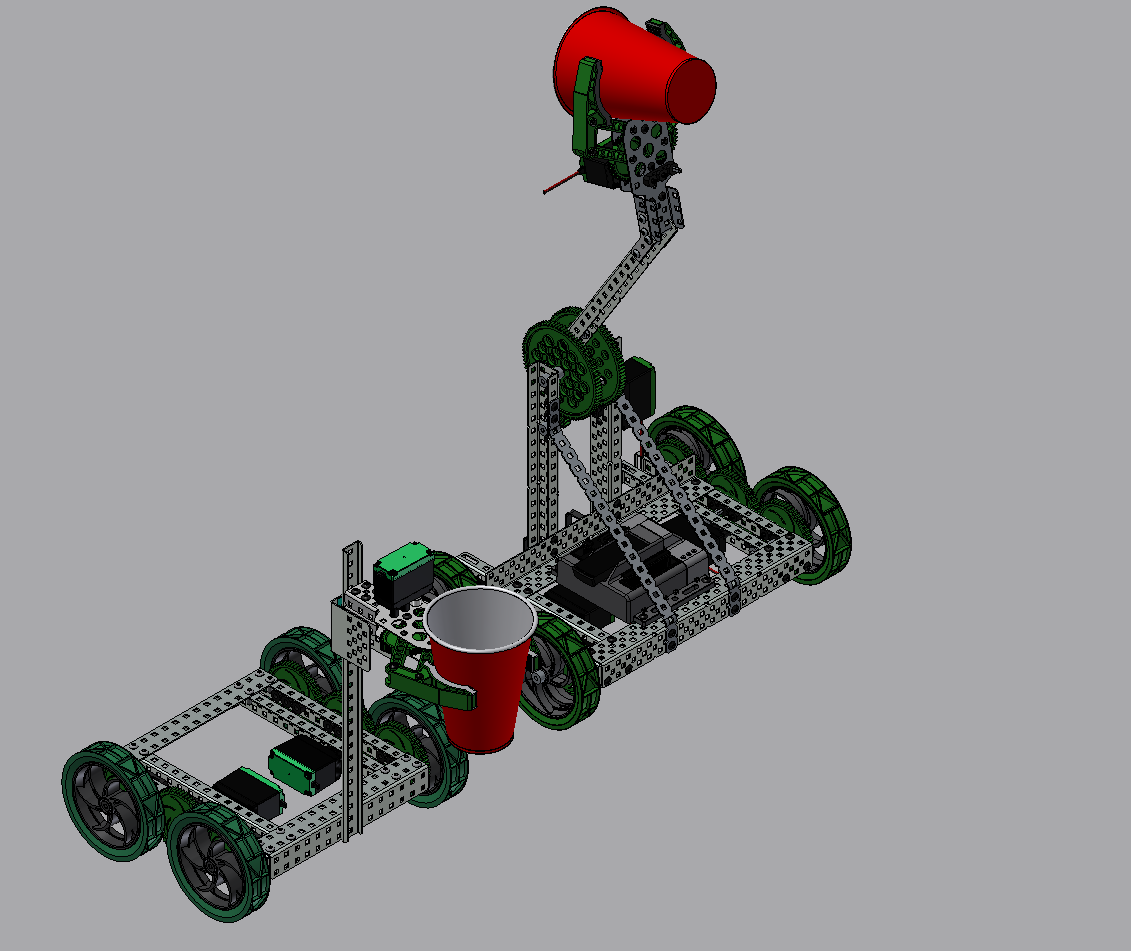
In the above example, as the rotating joint lifts the cup, it spills it! The elevator lifts the cup straight up without any spilling.
Elevator Actuation & Loading:
Actuation of a linear elevator is a little different than a rotating joint. Unlike a rotating joint, an elevator somehow must convert the rotary motion of a motor into the linear motion required to drive the elevator. There are several ways this is commonly accomplished.

In the above example a rack and pinion mechanism is used to drive the elevator. The pinion gear spins at some speed with an applied torque. This torque then applies a linear force at the gear’s pitch circle, which drives the mechanism.
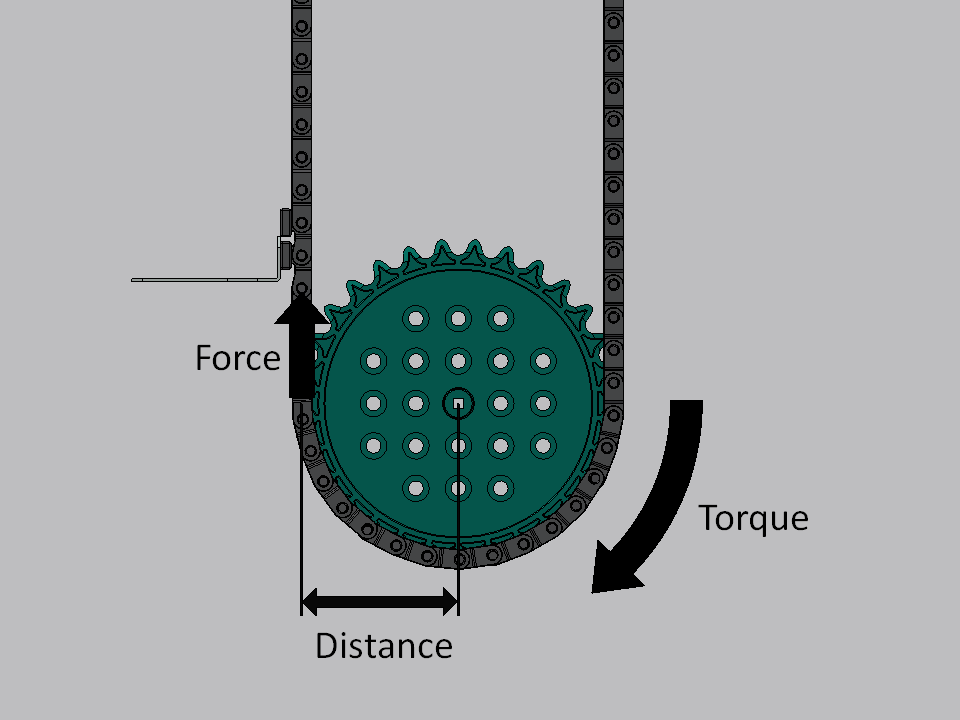
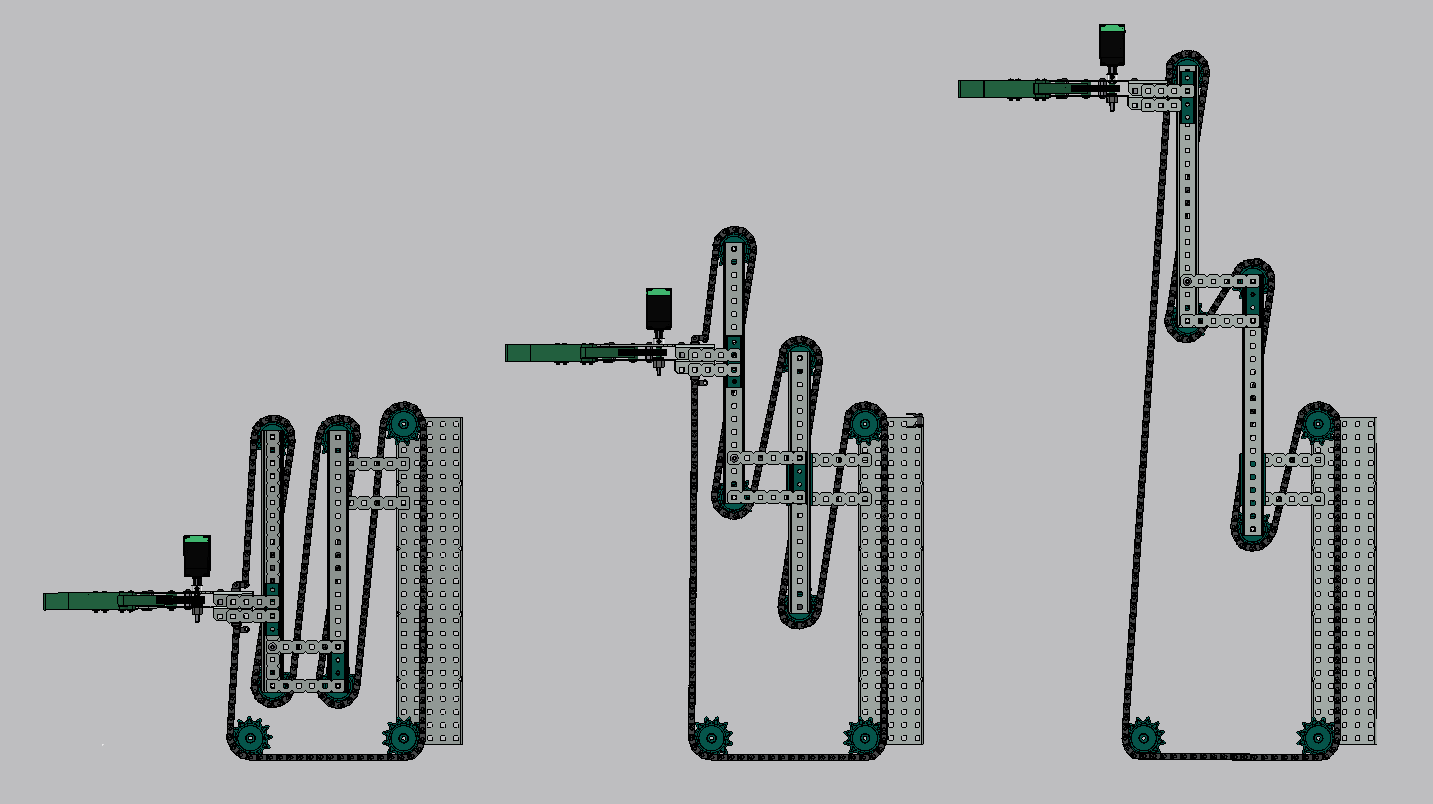
The above image shows how chain and sprockets can be used to drive a linear elevator. The torque on the driving sprocket spins the chain. The chain is attached to the linear elevator, and exerts a linear force to drive the mechanism.

In the above example, a winch is used to drive a linear elevator. A motor applies torque to the winch which provides a linear force along a rope, which then drives the mechanism.
Multiple Stage Elevators:
Single stage elevators are able to lift up only one extension of their length. That is, if the elevator is one meter tall, it will be able to lift a claw from the bottom to the top, a total of one meter. However, multiple stage mechanisms are also possible. By stacking multiple linear elevators together, one can create a mechanism which will reach up much higher than their own height.