Below is some of the terminology that will be important as student designers learn about the various types of drivetrains.
DRIVE WHEEL – a wheel to which power is transferred and is used to propel the robot forward. Not all wheels are drive wheels, some wheels do not help to move the robot.
TURNING POINT – the point around which a robot is turning.
TURNING SCRUB – the friction caused by wheels dragging “sideways” along the ground as the robot turns. Turning scrub resists the robot turning.
ZERO RADIUS TURN – A zero radius turn is when a robot turns in place without moving forward. In a zero radius turn, the turning point of the robot is at the center of the robot.
CHASSIS – The structure of a robot which holds the wheels, motors, and gear-train in place.
DRIVETRAIN TYPES:
There are a number of different drivetrain types commonly found in competition robotics. All of these types have their own benefits and drawbacks. A few common types are described below.
Ackermann “Car Style” Steering:

In this type of drive, all the wheels move in the same direction: forward or backwards. Steering is accomplished by turning the wheels such that all the wheels are positioned in an arc around a single turning point.
One of the benefits of this configuration is that there is no turning scrub when it is properly set up. However, a major drawback for this type of drive is its inability to perform a zero radius turn.
Skid Steer:
This is the most common type of competition robotics drivetrain. This style is sometimes referred to as “tank drive” since it is commonly used on tanks. In this type of drivetrain, the wheels on the right side and the left side of the drive are powered by separate motors. These wheels are locked pointing forward/backward, and do not steer. Steering is accomplished by varying the speed of the different sides (i.e. if the right side goes forward very fast, and the left side goes forward slowly – the robot turns left).

This type of drivetrain is capable of zero radius turns; the robot driver would simply power one side forward and the other side in reverse.

This type of drive does require two motors, but does not require a specific actuator for steering – both motors are used when it is going straight, so ALL power can be used for acceleration or pushing. When this drivetrain turns, it does have turning scrub (this will be described in more detail later).
Skid Steer drivetrains can come in many different configurations, but they all function the same way.

The rest of this unit will focus on Skid Steer type drivetrains.
Swerve Drive:
Another type of competition robotics drivetrain is known as a swerve drive. A swerve drive is one in which the wheels are not only powered forwards & backwards, but can also be independently steered. This means the robot can turn like a Skid Steer robot, but can also move in any direction by steering its wheels.


Crab Drive:
A Crab Drive system is one which utilizes two sets of skid-steer drivetrains, each pointed in different directions. Only one of these drives would be on the ground at a given time. For instance, a crab drive would have a primary skid-steer drive pointed forwards/backwards, and could drive around normally on this. Then it could drop a secondary drivetrain pointed right/left, lift its primary drive off the ground, and be able to move right or left (like a crab).
Omni-Directional Drivetrain:
A drivetrain that can move in any direction at a given moment, without waiting for wheels to steer is called an Omni-Directional Drivetrain. These drivetrains use special wheels, called “omni-wheels”. Omni-wheels are wheels with small rollers around the perimeter that freely spin perpendicular to the wheel’s rolling direction. This means that the wheels can slide sideways with very low friction.

In the image above, the green rollers spin freely perpendicular to the way the wheel moves. The wheel can slide sideways on these rollers!
These wheels can be used in a variety of configurations to allow for omni-directional driving. Two common configurations are shown below:


Since omni-wheels don’t have any sideways friction, the wheels facing forward/backward can drive without the wheels facing right/left dragging. By powering both sets of wheels, the robot can move in any direction.


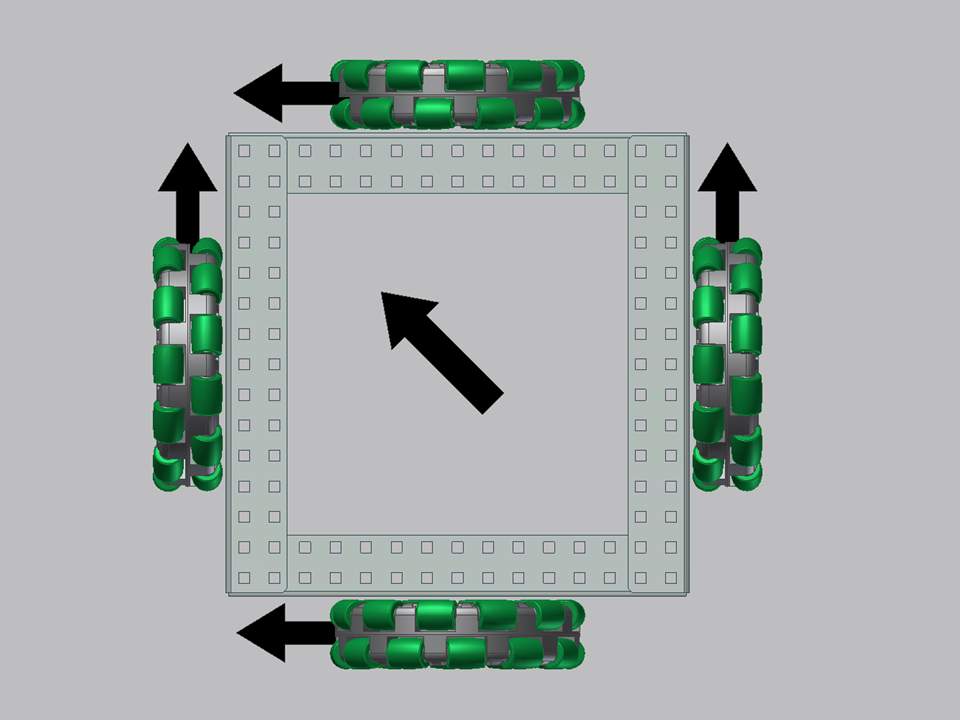
One problem with omni-drives is the requirement for multiple motors, with only some of the motors contributing to the robots forward motion at most times. A simple skid-steer drive can be built with two motors, but a square omni-drive like the one above requires four motors.